Previous issue | Next issue | Archive
Volume 4 (1); April, 2015
|
Research Title/ |
Article Information / |
Download |
|
PII: S232251141500001-4 Path-Finding in Multi-Agent, Unexplored and Dynamic Military Environment Using Genetic Algorithm |
Original Research, D1 ABSTRACT: Path-finding in multi-agent, unexplored and dynamic military environment is one of the most important issues for solving in simulators. In this article a substructure of agent Path-finding is created which these agents are placed in an unexplored environment, also they communicate each other and use proposed methods to find targets to reach them. The most important aim of this article is to consider the targets behavior to decrease the required cost for reaching to the targets by improving agent’s behavior in a dynamic military environment and improving agent’s interactions. In the proposed method each agent has movement ability in a dynamic environment autonomously and they have ability to finding targets between obstacles. Therefore to solve this problem all of the necessary constraints to find path in a dynamic and unexplored environment are considered and Genetic algorithm is used. |
|
|
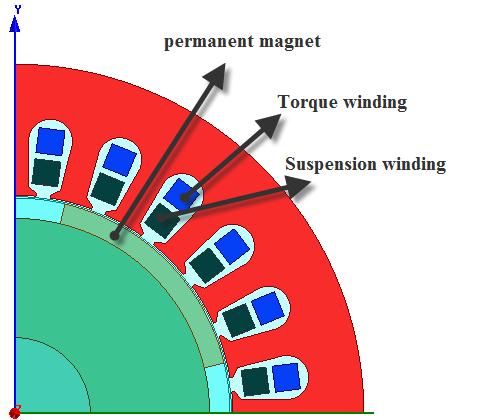
PII: S232251141500002-4 Optimal Design of Bearingless Permanent Magnet-Type Synchronous Motors for Generating Maximum Levitation Force
|
Original Research, D2 ABSTRACT: One maintenance task that still exist with conventional motors, are bearing lubrication and renewal. Bearingless motors are replaced with conventional motor that uses a magnetic levitation force to suspend a rotor without any mechanical contact. In bearingless motors, additional windings are wound together with motor windings in stator slots. In this paper, a bearingless permanent magnet-type synchronous motor (BPMSM) Has been studied. First, the generation of radial levitation forces is discussed and then the optimum permanent magnet thickness is determined to produce maximum levitation force. After that the effect of additional winding pole-pair in the amount of levitation force is investigated. The simulation is done in Maxwell software. |
|
|
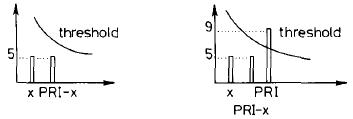
PII: S232251141500003-4 Studying an Improved Interval-Only Algorithm for the De-Interleaving of Radar Pulses
|
Original Research, D3 ABSTRACT: In the electronic intelligence system (ELINT) in the process of identification radar signals are used both technical and tactical parameters. The detailed analysis of radar signal parameters was made in conjunction to radar applications. The paper presents an improved method for the deinterleaving of radar signals, based on a time of arrival analysis and the use of the sequential difference histogram (SDIF) for determining the pulse repetition interval (PRI). In this paper, mathematical modeling of interval-only algorithms, their block diagrams and implementations steps as well as their ability in Deinterleaving of radar pulses are analyzed. |
|
|
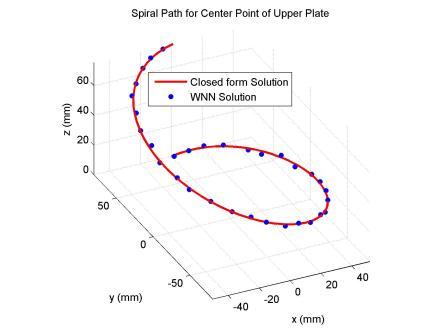
PII: S232251141500004-4 Direct Kinematics solution of 2-(6UPS) Hybrid Manipulator based on Neural Network |
Original Research, D4 ABSTRACT: This contribution addresses forward kinematic solution of modular hybrid manipulator which includes two same Stewart mechanism in serial form known as 2-(6UPS) manipulator. First, using geometrical and vectorial analysis, mathematical model of kinematic analysis for 2-(6UPS) is extracted. As mapping the length of pods to location (orientation and position) of moving mid and upper platforms (forward kinematic) in this specific mechanism is so difficult to solve, which it is related to complicated configuration of 2-(6UPS) and highly nonlinear characteristic of extracted mathematical model. Therefore, we proposed artificial neural network (ANN) based wavelet analysis to resolve forward kinematics of 2-(6UPS). Also, we used wavelet neural network (WNN) to approximate specific trajectory in circle path with oscillating amplitude in z direction and spiral path with elliptical base paths for mid and upper platforms movement respectively. Comparison between the results of proposed network and closed form solution (CFS) of kinematics for 2-(6UPS) shows proper performance of proposed network in less than %1 error. |
|
|
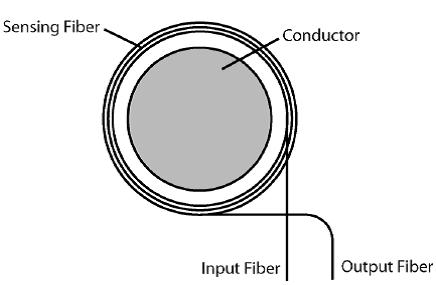
PII: S232251141500005-4 Current Measurement with Optical Current Transformer |
Original Research, D5 ABSTRACT: Applying an optical current transformer (optical CT) to substations has several advantages, e.g. high accuracy and reduction of the cost. In particular, in the case of a digitally controlled substation, the optical CT assures the insulation performance and is free from network damage caused by dielectric breakdown. Since optical instrumentation technology provides excellent electromagnetic noise rejection and high insulation performance, it can be effectively applied to many applications for maintenance and supervision of electric power systems. The optical current transformer developed is based on the principle of Faraday Effect. Also, the information measured by the optical CT is transmitted to the ground side through optical fibers contained in an insulator. As an application of the optical CT, a new fault location system has been developed. |
|
|
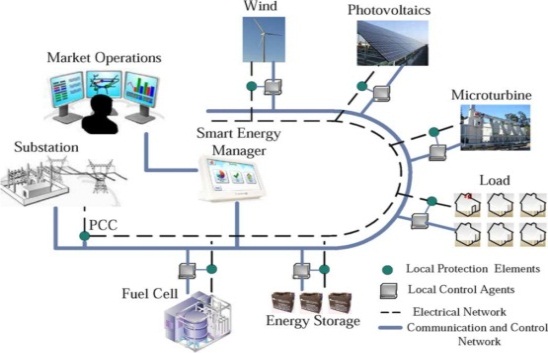
PII: S232251141500006-4 Reliability Constrained Energy and Reserve Scheduling of Microgrids Including High Penetration of Renewable Resources
|
Original Research, D6 ABSTRACT: Due to environmentally and economically advantages, high deployment of renewable energy sources (RES) such as wind or photovoltaic (PV) units in Microgrids (MG) has been increasing in recent decades. On the other hand, random and uncertain nature of the RES poses a challenge to Microgrid operators (MGO) for energy and reserve scheduling considering reliability constraints. To address this problem, a novel probabilistic energy and reserve scheduling method is proposed in this paper. The proposed method maximizes the Microgrid net benefit and reliability so that the optimal requirement reserve is determined by a tradeoff between reliability and economics. |
|
| PII: S232251141500007-4 Optimal Charge-Discharge Scheduling of Electric Vehicles Considering Their Battery Lifetime 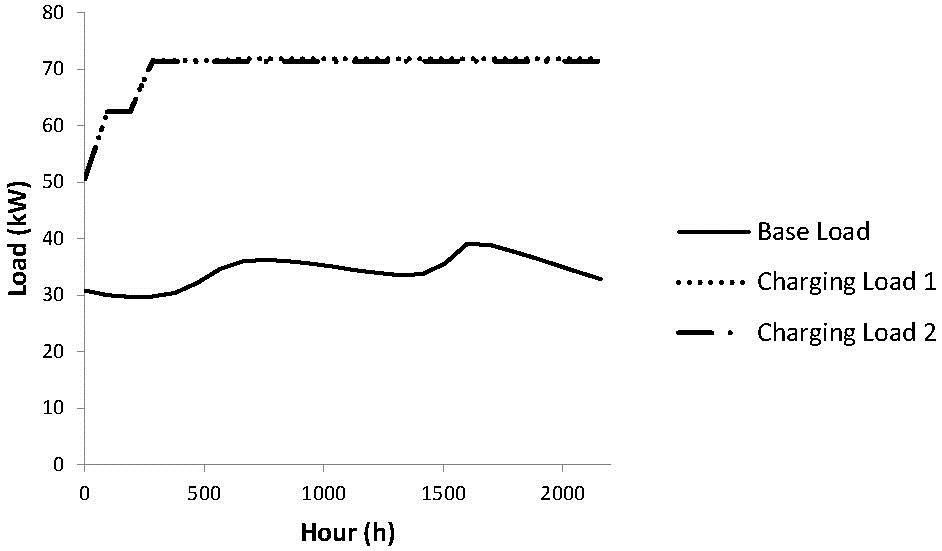 |
Original Research, D7 ABSTRACT: Due to environmentally and economically advantages, high deployment of renewable energy sources (RES) such as wind or photovoltaic (PV) units in Microgrids (MG) has been increasing in recent decades. On the other hand, random and uncertain nature of the RES poses a challenge to Microgrid operators (MGO) for energy and reserve scheduling considering reliability constraints. To address this problem, a novel probabilistic energy and reserve scheduling method is proposed in this paper. The proposed method maximizes the Microgrid net benefit and reliability so that the optimal requirement reserve is determined by a tradeoff between reliability and economics. |
 |
|
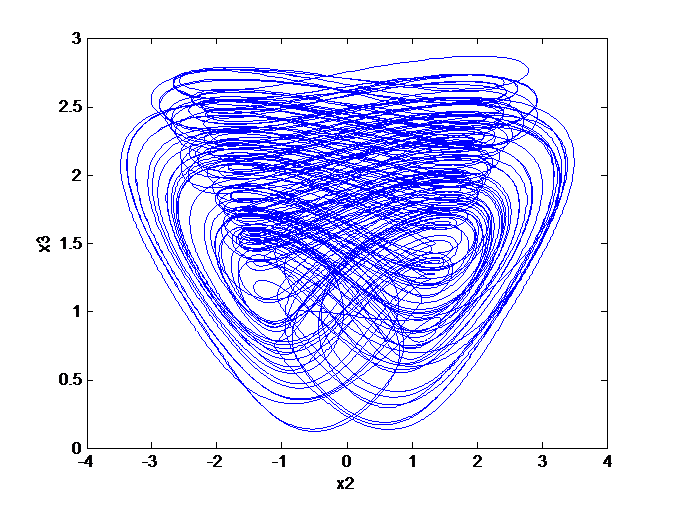
PII: S232251141500008-4 Introducing a New High-Order Chaotic System with an Equilibrium Point and Stabilizing It Using LQR Controller |
Original Research, D8 ABSTRACT:In this paper, a new high-order chaotic system is proposed. This system has an equilibrium point on center and its specific feature is existence of two large Lyapunov exponents compared to other high-order chaotic systems. In order to prove the existence of high-order chaos in this system, criteria such as energy dissipation of the system, instability of equilibrium point, system absorption and Lyapunov exponents of system are used. Investigating the mentioned criteria confirms the existence of chaos in the system under study. Then, by changing system parameters, different dynamic behaviors such as the limit cycle and high-order chaos can be observed in the system. Finally, using a Linear Quadratic Regulator (LQR) controller, chaotic system’s stability around equilibrium point is guaranteed. |
|